Jens “jenslabs” Clarholm is an artist who leverages technology, notably a sophisticated drawing machine, as a central instrument for his exploratory and generative artistic endeavors.

Drawing Machine Art - Analog generative art


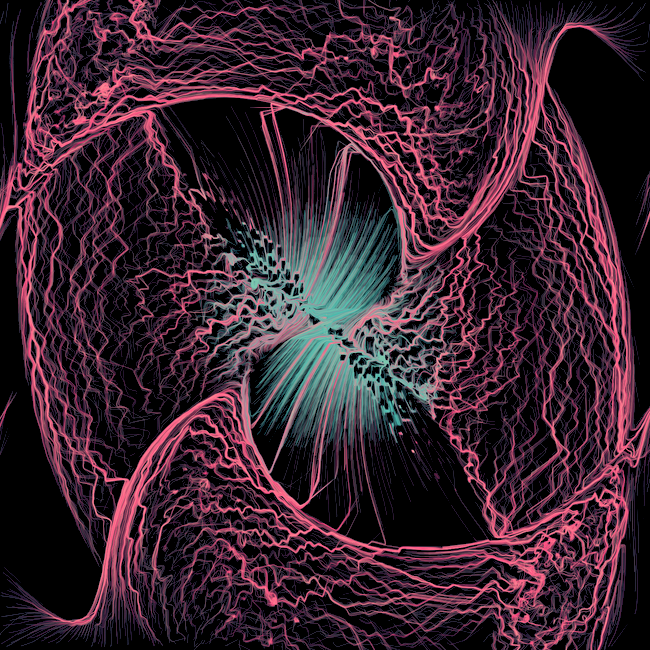
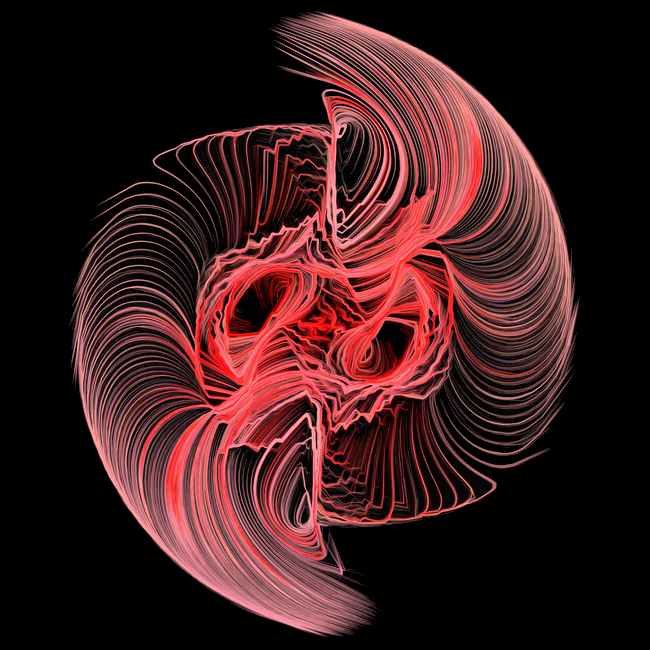
I create art using a drawing machine of my own design. Unlike traditional plotters that simply execute predetermined paths, my machine operates on the harmonious interaction of three independent motors. Finding the right combination of speeds and movements is like tuning an instrument - most combinations create chaos, but at certain sweet spots, intricate patterns emerge organically.
When working with the machine, I respond to its movements in real-time, much as a painter responds to how paint flows on canvas. Each piece evolves through this dialogue between artist and machine, enhanced by custom-made tools and ink dispensers I've developed for this unique process. The result is artwork that merges mechanical precision with artistic spontaneity.


Pen Plotter work
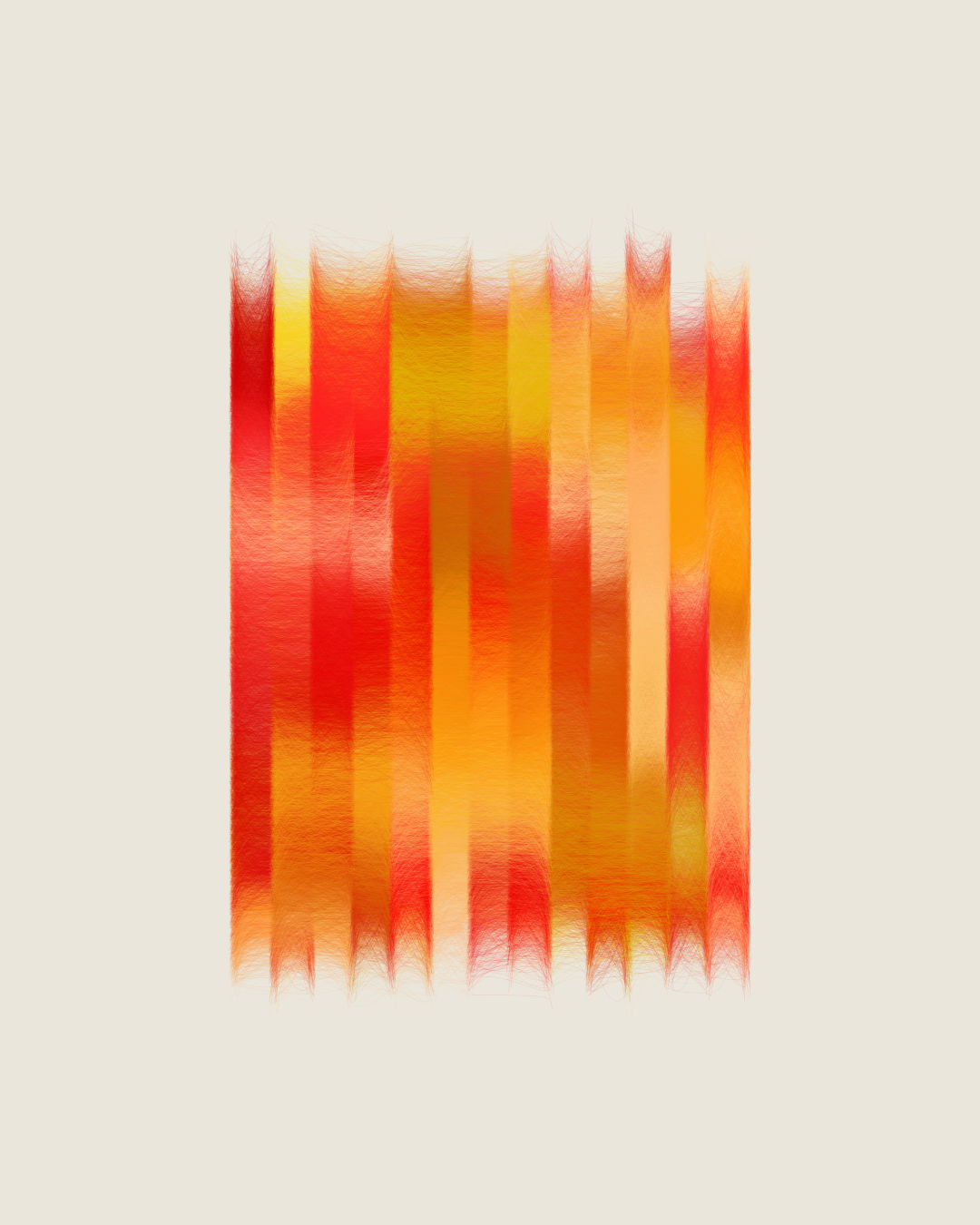
My pen plotter work range from complex algorithmic patterns to deliberately composed pieces, each exploring the interplay between precision and organic form. Through careful linework, I investigate how geometric and natural elements can coexist within a single piece, whether driven by computational processes or intentional design.
Working with a pen plotter equipped with custom tools, including a pen holder with precise z-axis control, I can experiment with different pressures, inks, and brushes. This versatility lets me use the plotter as both a precise mechanical tool for algorithmic work and as a sophisticated brush holder for more traditional artistic approaches, bringing together digital and manual techniques in unexpected ways.